机器人视觉 、计算机视觉、图像处理、机器视觉和图形识别,这几者之间到底有神马区别呢?要弄清楚他们哪一个是哪一个,有时候也真的是容易混淆的。接下来看看这些术语的具体含义是什么,以及他们与机器人技术有什么关联。读了这篇文章后,你就再也不会被这些概念弄糊涂了!在这篇文章当中,我们分解了机器人视觉的“族谱”,以显示在更广泛的信号处理领域所在的位置。
什么是机器人视觉
Robot Vision
机器人视觉是指使机器人具有视觉感知功能的系统,是机器人系统组成的重要部分之一。在基本术语中,机器人视觉涉及使用相机硬件和计算机算法的结合,让机器人处理来自现实世界的视觉数据。例如,您的系统可以使一个二维摄像头,检测到机器将拿起来的一个对象物,更复杂的例子可能是使用一个3D立体相机来引导机器人将车轮安装到一个移动中的车辆上。
如果没有机器视觉,你的机器人基本上是个瞎子,对一些机器人任务来说,这也许不是一个问题,但对于某些应用来说,机器人视觉是有帮助的,甚至是必不可少的。
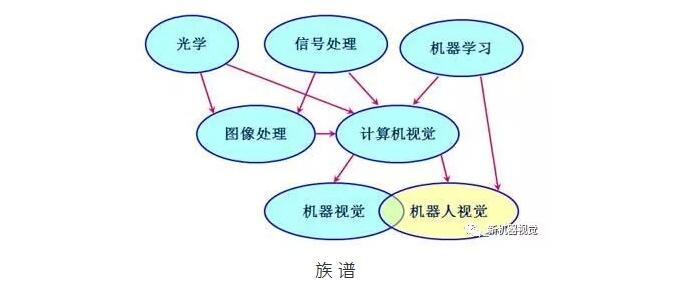
机器人视觉的族谱
机器人视觉与机器视觉密切相关,机器视觉我们稍后再介绍。他们两个又都与计算机视觉密切相关,从族谱图中可以看出计算机视觉可以看作是他们的父母。然而,为了详细的了解他们在整个系统中的位置,我们要更进一步介绍他们的祖父母-信号处理。
 信号处理
Signal Processing
信号处理
Signal Processing
信号处理包括处理电子信号、或是清理(例如:除噪)、提取信息、为输出到显示端的前置预处理、或者为他们的进一步处理做准备的预处理。任何东西都可以是一个信号,或多或少,有各种类型的信号可以被处理,例如:模拟信号,数字信号,频率信号等等,图像基本上只是二维(或更多维)的信号,对于机器人视觉,我们感兴趣的是针对图像的处理。
图像处理与计算机视觉
Image Processing vs Computer Vision
计算机视觉和图像处理就像堂兄妹,但他们有着很不同的目标。图像处理技术主要是用来提高图像的质量,将其转换成另外一种格式(如直方图)或改变它以进一步处理。另一方面,计算机视觉更侧重于从图像中提取信息,以感知它们。因此,您可能会使用图像处理将彩色图像转换为灰度图像,然后用计算机视觉检测图像中的对象。如果我们再进一步往上看这个族谱,我们看到,这两个领域都受物理领域很大的影响特别是光学。
图形识别与机器学习
Pattern Recognition and Machine Learning
到目前为止,情况还这么简单。当我们将图形识别或更广泛的机器学习加入到族谱中的时候,情况就开始变得有些复杂,这个分支专注于识别数据中的图形,对于需要机器人视觉相对更先进的功能来说这是相当重要的。例如,为了能够从它的图像中识别一个对象,该软件必须能够监测到它所看到的对象是不是之前看到过的对象。因此,机器学习是计算机视觉除信号处理之外的另外一个母体。
然而,并不是所有的计算机视觉技术都需要机器学习,你也可以仅使用信号而不是图像进行机器学习,然后将其作为一个Input输入到机器学习算法。例如。计算机视觉检测到传送带上的零件大小和颜色,然后机器学习根据它从正常的良品看起来应该是什么样子学到的知识,来判定这些零件是不是不良品。
 机器视觉
Machine Vision
机器视觉
Machine Vision
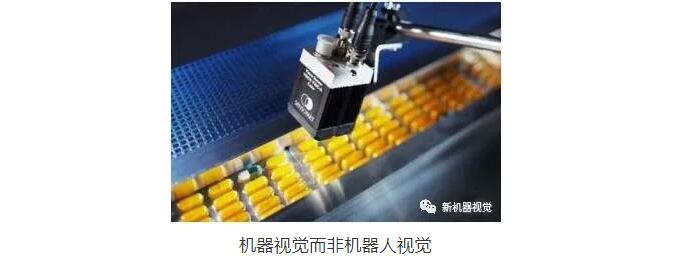
现在我们谈到机器视觉,一切都将改变。这是因为机器视觉完全不同于之前谈到的术语。它更侧重于特定的应用,而不仅仅是关注技术的部分,机器视觉是指工业用途的视觉来进行自动检测、过程控制和机器人导引。族谱的其余部分是科学领域,而机器视觉是一个工程领域。
某种程度上来说,你可以认为机器视觉是计算机视觉的孩子,因为它使用计算机视觉和图像处理的技术和算法。但是,虽然它可以用来指导机器人的,他又不完全是机器人视觉。
机器人视觉

最后,终于到达机器人视觉。如果你一直跟随阅读这篇文章直到现在,你会意识到机器人视觉采用了所有以前的技术。在许多情况下,机器人视觉和机器视觉相互交替使用。然而,还是有些微妙的差异,一些机器视觉应用,如零件监测,与机器人无关,工件仅仅是放置在一个用来探测不良的视觉传感器前面即可。
此外机器人视觉不仅是一个工程领域,它也是一门有自己特定的研究领域的科学,区别于纯计算机视觉研究,机器人视觉必须将机器人技术纳入到其技术和算法。视觉伺服就是一个智能被称为机器人视觉技术而不是计算机视觉的完美典范。它涉及到机器人的运动控制,通过使用视觉传感器检测到机器人位置的反馈。
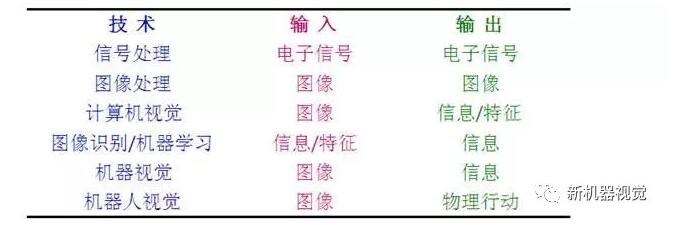
输入与输出
下面汇总上面介绍的每个领域术语的基本的输入和输出来结尾这篇文章。
声明:部分内容来源于网络,仅供读者学习、交流之目的。文章版权归原作者所有。如有不妥,请联系删除。

